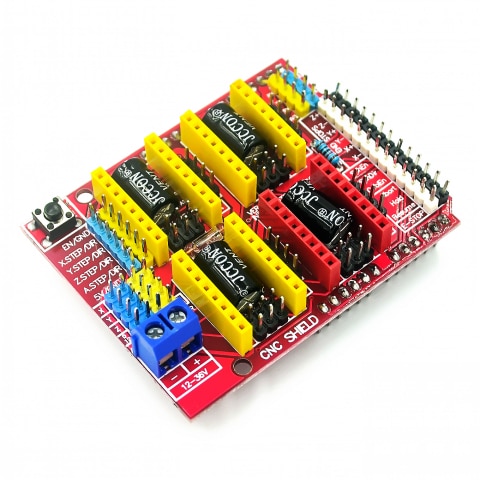
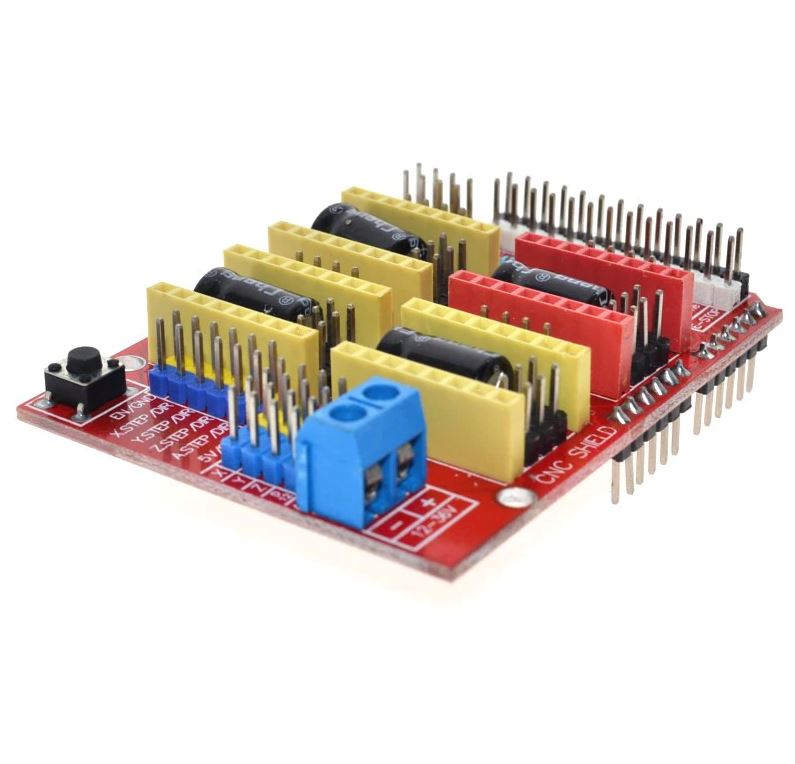
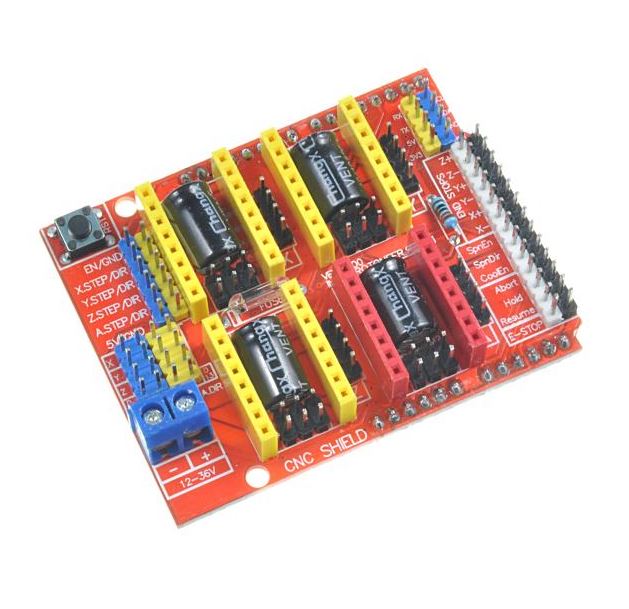

Ez a bővítőlap alkalmas gyors gépekhez, 3D nyomtatókhoz stb., négy helyet tartalmaz az A4988 léptető motor meghajtóihoz.
A csomag tartalmaz egy CNC Shield 3D nyomtatókhoz Arduino-hoz.
Példa:
//Az alábbiakban egy egyszerű léptető motor vezérlési eljárása:
# define EN 8 // léptető motor engedélyezése, aktív alacsony
# define X_DIR 5 // X-tengely léptető motor irányítása
# define Y_DIR 6 // Y-tengely léptető motor irányítása
# define Z_DIR 7 // Z-tengely léptető motor irányítása
# define X_STP 2 // X-tengely léptető vezérlés
# define Y_STP 3 // Y-tengely léptető vezérlés
# define Z_STP 4 // Z-tengely léptető vezérlés
/*
function: lépés. funkció: a léptető motor irányának és lépésének irányítása. A verem száma a lépés során. nincsen visszatérő érték.
* /
void step (boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite (dirPin, dir);
delay (50);
for (int i = 0; i < steps; i++) {
digitalWrite (stepperPin, HIGH);
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {// A léptető motorok I/O lábai kimenetre állítva
pinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
pinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, LOW);
}
void loop () {
step (false, X_DIR, X_STP, 200); // X tengely motor visszafelé egy fordulatot, a 200 lépés egy kör.
step (false, Y_DIR, Y_STP, 200); // Y tengely motor visszafelé egy fordulatot, a 200 lépés egy kör.
step (false, Z_DIR, Z_STP, 200); // Z tengely motor visszafelé egy fordulatot, a 200 lépés egy kör.
delay (1000);
step (true, X_DIR, X_STP, 200); // X tengely motor előre egy fordulatot, a 200 lépés egy kör.
step (true, Y_DIR, Y_STP, 200); // Y tengely motor előre egy fordulatot, a 200 lépés egy kör.
step (true, Z_DIR, Z_STP, 200); // Z tengely motor előre egy fordulatot, a 200 lépés egy kör.
delay (1000);
}
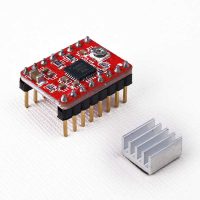
Megjegyzés: Az A4988 modult behelyezve óvatosan ügyeljen arra, hogy ne fordítva helyezze be. A léptető motor vezetékezése a következő módon történik:
2A, 2B egy csoport (piros, zöld), 1A, 1B egy csoport (kék, sárga), ha változtatni szeretne az irányon, az egyik csoport helyzetét is megváltoztathatja, például 2A, 2B kölcsönösen felcserélve.
# define EN 8 // léptető motor engedélyezése, aktív alacsony
# define X_DIR 5 // X-tengely léptető motor irányítása
# define Y_DIR 6 // Y-tengely léptető motor irányítása
# define Z_DIR 7 // Z-tengely léptető motor irányítása
# define X_STP 2 // X-tengely léptető vezérlés
# define Y_STP 3 // Y-tengely léptető vezérlés
# define Z_STP 4 // Z-tengely léptető vezérlés
/*
function: lépés. funkció: a léptető motor irányának és lépésének irányítása. A verem száma a lépés során. nincsen visszatérő érték.
* /
void step (boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite (dirPin, dir);
delay (50);
for (int i = 0; i < steps; i++) {
digitalWrite (stepperPin, HIGH);
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {// A léptető motorok I/O lábai kimenetre állítva
pinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
pinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, LOW);
}
void loop () {
step (false, X_DIR, X_STP, 200); // X tengely motor visszafelé egy fordulatot, a 200 lépés egy kör.
step (false, Y_DIR, Y_STP, 200); // Y tengely motor visszafelé egy fordulatot, a 200 lépés egy kör.
step (false, Z_DIR, Z_STP, 200); // Z tengely motor visszafelé egy fordulatot, a 200 lépés egy kör.
delay (1000);
step (true, X_DIR, X_STP, 200); // X tengely motor előre egy fordulatot, a 200 lépés egy kör.
step (true, Y_DIR, Y_STP, 200); // Y tengely motor előre egy fordulatot, a 200 lépés egy kör.
step (true, Z_DIR, Z_STP, 200); // Z tengely motor előre egy fordulatot, a 200 lépés egy kör.
delay (1000);
}
Megjegyzés: Az A4988 modult behelyezve óvatosan ügyeljen arra, hogy ne fordítva helyezze be. A léptető motor vezetékezése a következő módon történik:
2A, 2B egy csoport (piros, zöld), 1A, 1B egy csoport (kék, sárga), ha változtatni szeretne az irányon, az egyik csoport helyzetét is megváltoztathatja, például 2A, 2B kölcsönösen felcserélve.
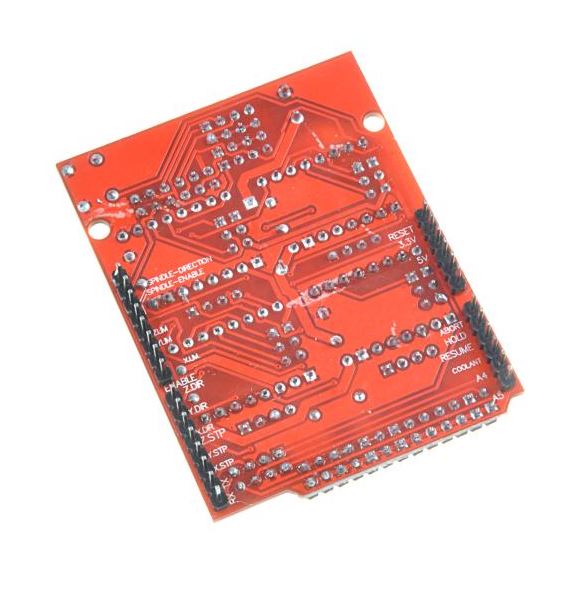
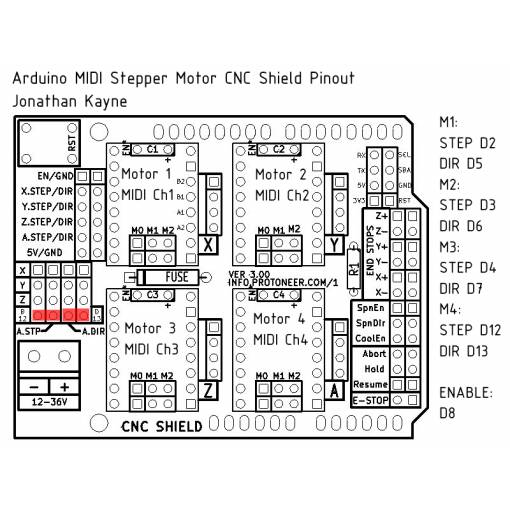
A UNO az Arduino bővítőlap----------------------
8 ------------------------ EN ( léptető motor meghajtó engedélyezése, aktív alacsony)
7 ----------------------- Z.DIR (Z tengely irányának vezérlése)
6 ----------------------- Y.DIR (Y tengely irányának vezérlése)
5 ----------------------- X.DIR (X tengely irányának vezérlése)
4 ---------------------- Z.STEP (Z tengely léptető vezérlés)